Pedestrian Motion Prediction and Tracking
People Tracking using Probabilistic Cellular Automaton
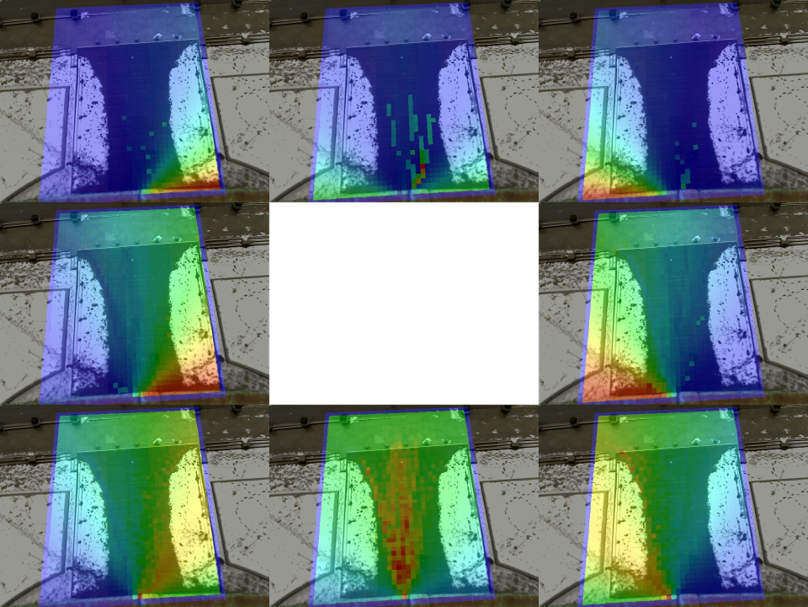
We propose a method for learning a probabilistic cellular automaton from people trajectories and applies the cellular automaton to people tracking in videos. For learning the probabilistic cellular automaton, we introduce dirichlet smoothing to compensate for the lack of the trajectory data because it is difficult to collect the dense and enough data. Furthermore for tracking people, we develop a data assimilation algorithm to sequentially update the probabilistic cellular automaton using the sequence of images. We demonstrate that the proposed probabilistic cellular automaton provides better tracking performance than the existing models.
Kazuhiko Kawamoto, Yusuke Koga, Kazushi Okamoto, Learning a probabilistic cellular automaton for people tracking, Journal of Japan Society for Fuzzy Theory and Intelligent Informatics, vol.28, no.6, pp.932-941, 2016 (in Japaneses).
Kriging-based Trajectory Prediction
This paper proposes a method for learning pedestrian dynamics with kriging, which is a spatial interpolation method in geosciences. Pedestrian dynamics is generally restricted by other pedestrians and its restriction is caused by social interaction between them. In the proposed method, the social interaction is represented by spatio-temporal correlation of pedestrian dynamics and the correlation is estimated by kriging. As an application of the proposed method, the prediction of pedestrian movement is examined and its performance is evaluated with publicly available benchmark dataset. The experimental results show that 10-step ahead prediction is successful with more than 80% trajectories of the datasets if 2.0[m] distance error is allowed.
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi Okamoto, Kriging-based prediction and interpolation for modeling pedestrian dynamics, Proc. IFSA&SCIS , pp.1-4, 2017.
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi OKAMOTO, Learning pedestrian dynamics with kriging, In Proc. 15th IEEE/ACIS International Conference on Computer and Information Science, pp.39-42, 2016
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi Okamoto, Pedestrian-movement prediction by kriging, In Proc. 4th IWACIII, pp.94-97, 2015.
Social Force Model-based Trajectory Prediction
We propose a method for recursively estimating the parameters of a numerical simulation model for pedestrian motion using an image sequence. We construct the model with socalled social forces, which have been successfully used in computer simulations for pedestrian motion analysis. The contribution of this paper is to combine the numerical simulation model and observations captured from image sequences. To this end, we introduce the framework of data assimilation, which is originally developed in geosciences such as weather forecasting and hydrology for refining numerical simulation models using observations available in the real world. In addition we use a particle filter for the recursive Bayesian estimation In experiments with real videos we show a case study of pedestrian motion analysis.
K. Kawamoto, Learning a Social Force Model for Pedestrian Motion Analysis from Image Sequences, In Proc. 4rd International Symposium on Computational Intelligence and Industrial Applications(ISCIIA2011), pp.3-10, 2010.
K. Kawamoto, A Data Assimilation Method for Estimating the Parameters of a Social Force Model for Pedestrian Motion Analysis, In Proc. 7th International Forum on Multimedia and Image Processing (IFMIP) in World Automation Congress (WAC), CD-ROM proceeding, 2010.